









| ˮ�����˻�ԭ������ |
[�����]��Դ����һֱ������AUV��ҵ��Χ����Ҫ���أ��о����������ʸߵ���Դ��һ������Ŭ���ķ��� ˮ�����˻�ԭ������
ˮ�����˻���һ�ֿ���ˮ���ƶ��������Ӿ���֪ϵͳ��ͨ��ң�ػ�����������ʽ��ʹ�û�е�ֻ��������ߴ��������ȥ���ˮ����ҵ�����װ�á���������70�����ˮ�����˻��õ��˺ܴ�չ����������һ���ܹ����ڸ��ֲ�ͬ��ȡ����ж�����ҵ�Ļ����ˣ�������ʯ�Ϳ��ɡ�����ص��顢������ҵ���ܵ�����ͼ�顢���·���ͼ�顢������ֳ������ˮ��Ĵ�Ӽ�������
ˮ�����˻�����
ˮ�����˻�UUV��Unmanned Underwater Vehicle�ɷ�Ϊ�����ࣺһ��������ˮ�����˻���ϰ�߳���ҷʽˮ�����˻�(Towing Underwater Vehicle�����TUV)��һ����ң��DZ��(Remote Operated Vehicle�����ROV);��һ��������ˮ�����˻���ϰ�߳�Ϊ����ʽˮ��DZ��(Autonomous Underwater Vehicle�����AUV)���ӵ�һ��������60�����������DZ����ʼ�������Ѿ�����ROV(70���)��AUV(80���)�ͻ�����͵ĵ��Ĵ�(Hybrid Vehicles)���ݽ���
ˮ�����˻���������
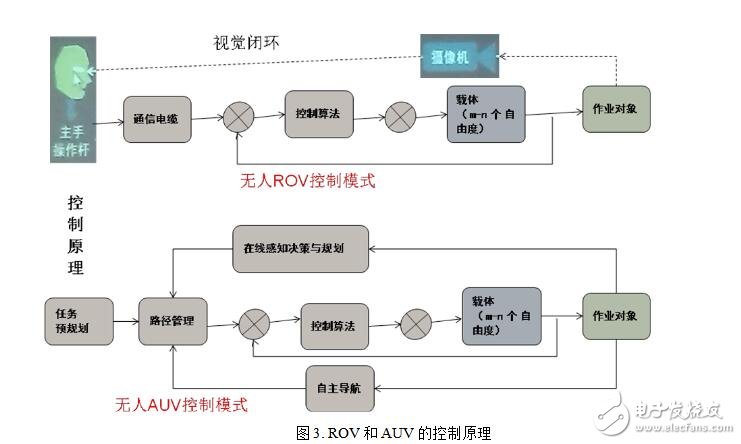
ˮ�����˻�����ˮ���˶��ľ����������ɶȵĸ��壬����������һ��ǿ��ϵķ�����ϵͳ;������ˮ���˶���ˮ����(����)ϵ�����˶��ٶȵ�ƽ���ɱ���;�����������ƽ���������������ת��ƽ�������ȡ���һ��ʹ�ÿ��������ú����ѣ��ر���Ҫ���ڶ��������ҵʱ������ԭ�����������ʱ�ġ������桢�����ᡱ����ʹ�ö�����λ����ϵͳ�ĸնȺ������㶨����ҵ��Ҫ������һ���д��о������⡣ ͼ3������ˮ�����˻��Ŀ���ԭ����
ˮ�����˻��ı���
DZˮ����DZˮ����Я���۲����ҵ�����豸���˶����塣�ڿ�ʽ��ܽṹ���Ϸ��ĸ����飬��֤DZˮ��ȫ����ʱˮ�и�������Ϊ��;��ˮƽ������ʹ�ֱ����װ���ƽ������Ӷ���ʵ����ά�ռ���˶������ǰ�����Ҫ�ĵط�������̨��������װ�е���������������ơ�����Ĵ������������������ɡ����̡����ѹ�����������߶ȼƵȡ�ˮ�µ��ӵ�Ԫ������ˮ�¼������������������ģ�飬��װ�ڳ�ѹ���ܷ���ڡ�ϵͳ��������Ҫ�Ĵ���Ԫ�������� ������ѹ�����¶ȡ�©ˮ�ȡ�
�м�����Ϊ����Ѹ�١�ȷ�ؽ�DZˮ���͵�Ԥ������ˮ��ͽϿ���ջص�ˮ�棬ͬʱΪ�˼���ĸ��ҡ�ڼ��������ܺ���������DZˮ���˶�����ҵ�����ĸ������������ź�Ӱ�죬һ������ң��ˮ�����˻������м������м����ڴ���ϵ�£���װ��ϵ�������շŻ�����DZˮ���ǹ���״̬ʱ�����м���������һ��
����ϵͳ������Ͷ�š������м�����DZˮ��������ϵͳͨ���������νṹ��Һѹ���������������ڻ�����������µĴ��档
ϵ�£�����DZˮ�����м���֮���е�����Ӽ���Դ���ͺ���Ϣ���䡣ϵ���״�����������ʹ����ˮ��Ϊ�㸡�����Ӷ���Сˮ�������Ա���ĸ��š�
��װ���£��ڵ��ż����м���֮����ɻ�е�����ӡ���Դ���͡���Ϣ��������á����Ǹ�˿��װ�ṹ���Ա�ͬʱ���Ÿ��µ����ã�
�۲���ҵ�豸�����˶������ϰ�װ��������������ɣ���������Ļ���ϵͳ������Ҫ��ҵʱ�����ټ�װ1��2ˮ�»�е�ֺͶ���ˮ����ҵ���ߡ�
ˮ�����˻���ͨ������
��ͨ��ֱ����ص�������ϵͳ������ϵͳ�ͼ��ϵͳ��ǰ����Ҫָ����ˮ�����˻�ˮ��������ˮ�¹۲���豸��һ�������ˮ�����������̨���������������ɡ���ѧ�ʹ�ѧ��λϵͳ�ȡ�������Ҫָ����ˮ�����˻��˶����ƺͱ���ϵͳ������������Ҫ�Ĵ����豸��һ���������ȼơ��߶ȼơ��������̡��¶ȡ�ѹ������ѹ�����ȣ���Щ����ͨ���������ɼ�����ͨ���������߷�ʽ������Ϣ���䡣Ȼ��Ŀǰˮ��ͨ�ŵĽ����ֶ���ˮ�����ˡ�Ŀǰ�ӹ���������������ˮ���Ŀɿ�ͨ������Ϊ1200�����ʡ�ͨ��ʱ��ȡ����ˮ����ˮ������һ�����ķѵ�ʱ�䣬ˮ��Ϊ6000��ʱ������ʱ�����8�롣����ľ���ȡ����ʹ�õ��ز�Ƶ�ʼ�����Ĺ��ʣ���ˮ�����˻���˵�������߶��ܵ��˺ܴ�����ơ�ͨ��ʱ����һ�������ϲ��ܿ˷������⣬�������ڹ������Ƶ�����£����ͨ�ŵľ��뽫��һ����Ҫ���⣬Ŀǰͨ�ž����ʮ�������ͨ�ž��������AUV����ҵ��ΧҲ����֮��������ˮ����Ϣʵ�ּ�أ�����˷�����ʱ�������������ѡ���ͼΪһ��ˮ����ʵ���ӡ�
ˮ����ϵͳˮ����ϵͳ��һ�ֱ�����ѧϵͳ��ʹ���ĸ�RESON TC4013ģ���һ��ADI��˾SHARC-21369����ȷ����Է����ˮ����������������������20-35֮��kHz��Χ�ڵĶ��ˮ������������������������ֻ����������һ��ѡ���Ƶ�ʡ�ˮ����Ϊ������ͺ�����Ϣ�ṩ��ȷ�ȡ�1����Ϣ�������Ϣ�ڵ������������������������õ���
����һ�����ڴ��µ�ˮ�����˻�TUV��ROV���ɹ�˻�(ˮ��)�pˮ�¹�˻��p���� ��ɡ����ŵ��������ʸ�(100Mbit/s)�� �ܺõĿ�����������ȱ�㣬������ˮ�����˻��Ĺ�������Ϳɲ����ԡ�
ˮ�¼���ͨѶʹ�ú�ˮ������������С�����̼��⣬�Ѵ�100����ĺ���ͨѶ���룬���д�������Σ����ĺ�����ϴ�Ч�ʵͣ�ʵ�����д���ߡ�
ˮ�����˻�����Դ����
��Դ����һֱ������AUV��ҵ��Χ����Ҫ���أ��о����������ʸߵ���Դ��һ������Ŭ���ķ����ڿ���Ԥ���Ľ�����Ȼ�ϵ����һ�ֿɹ�ѡ��ķ�����δ�������ÿɱ��˥�ڵĺ�ȼ�ϵĵ�ء�����Щ������֮ǰ����������ǰ������װ����Ϊ�м�վ������ˮ�³�磬�����Ϳ���������̨AUV�����磬ʵ��ˮ�������ڵ���ҵ����Ȼ���������ܽ��AUV�Ĵ�Χ�������⡣������ROV��AUV����Դ�IJ�ͬҪ��
ROVˮ�����˻������ѹͨ����ˮ�����˻��Ĺ��ʺ�������йء�������ȵ����ӣ��ߵ�ѹ�Ķ������ͺͶ����豸�DZ���߱��ġ�Ϊ�˼���������µijߴ������������ROV����ø��ߵĵ�ѹ�ȼ�����Щ������ˮ���ṩ�����綯����һ����С��ˮ�����˻�����220V��50��60Hz���ཻ���繩�磬����ˮ�����˻�����3000v���ϵ����ཻ������ˮ�����幩�硣
AUV����Я����أ����ڶ�����ܷ��Ǧ���أ����ڶ���ø߱��ܵ���п��صȡ�
ˮ�����˻���չǰ�����������
��һ��ˮ�����˻��ķ�չ������ϻ������ROV��AUV���ŵ㣬��ROVҪ��һ��ˮ���ձ���6000��;���Dz��ݿ���ϵͳ����ô������������ʵʩ�������Ϻͽ������ֿ���;����DZˮ���ϵĻ�е�ֲ��ö�ܣ����������ϵͳ�����������ƽ����������빦�ʣ�������䶥����ҵ�������Ͳ������ܡ����⣬���ر�ע��DZˮ����С�ͻ��������۲���������AUV�����Ϲ����ص㻹Ҫ��������������������������������ⶪʧ��һ������DZ�������ٵ�������⡣�ӹؼ������ķ�չ�����ǿ��Է������£�
����Դ�������ӽ���Ĥȼ�ϵ�ؾ���ˮ�����˻��Ķ���װ����������ܡ��õ�ص��ص��������ܶȴ�Ч�������ܣ�����ʱ�����٣��ܿ��������ر�[9]���õ�ؼ����ѵ��Ǻ��ʵİ����á������·���á�ɢ�ȡ���̬���Һ�Լ�ȼ�Ϻ�����������Ч�洢��
�ھ�ȷ��λ���� Ŀǰˮ�����˻���ˮ�ϲ���GPS��ˮ�¶�λ������ѧ��λ�豸��ˮ��GPS����Ŀǰ����Ѹ�ٵط�չ�����ε����ľ���Ԥ�ƽ���5�������10����
����ɼ��ȵ������� ��ˮ��ҵһֱ��ˮ�����˻�Ӧ�õ�����ϰ���������ѧ�����⼼���Լ������ͼ����ǿ��������ʹ�������õ������
�ܲ��ϼ��� ��ˮ��ÿ����10m��ˮ����ѹ��������1������ѹ (0.1MPa)����ǿ�ȡ����ʡ���ʴ�Ľṹ���Ϻ���������ˮ�����˻��ص㷢չ�ļ������⡣
����ҵ���� ˮ�����˻��ķ�չĿ���Ǵ�������ɸ���ˮ����ҵ������ˮ�»�е�֡�ר��ˮ����ҵ�����Լ��ٳ��С�������ʵ�����ķ�չ������ˮ�����˻��ں����з��Ӹ�������á�
����ѧ���� ����Ϊ��ѧ�������������µ� ��ʸ�����ܼ���������ʹ����ˮ�����˻��ĸ��پ���ﵽ100km���ϡ���Ƶˮ��ͨѶ������ʹ��ˮ�µ�ͨѶ����ﵽ1000km���ϣ�ͼ���ˮ�´������ɴ�20km���ϡ�ˮ�������ķ�չ��ʹˮ�����˻��������С�ǧ�������
�����ܼ��� ��������������ͬ�����ܻ��˵������ǿƻõ�Ӱ�����飬��Ŀǰ�������ܵķ�չ�̶ȿ������нϳ���·Ҫ�ߡ����˲�����������ˮ�����˻��ǽ��Ŀǰ���ӵ�ˮ����ҵ����ʵ�취��
����ռ��� ˮ�����˻��ĵ��Ż�����ҵһ�����ں��渽�����У����Գ��ܺ������������ƶ���ΪӰ��ˮ�����˻�ˮ����ҵ����Ҫ���ء� |
| ��һƪ���й����˻���ʵ�֡��������䡱 ����Ŀǰ�� ��һƪ�����߶˷��������������������˻����̷ۡ��� |
 ������ |
 ���ںŶ�ά�� |
2024�����������˻�ϵͳ��ҵ������ �����绰010-6377 2018
ʱ�䣺2024��6��26��-28�� �ص㣺�����ֻ�չ����
��ICP��20026188��-5 Copyright © By ��ʥ��չ������ʥ������չ����˾