
2022/12/30撰文|小魔
在无人飞行器领域,大部分我们熟悉的无人机不是采用多旋翼就是固定翼设计。

其中多旋翼无人机有着飞行稳定,灵活性高,具备一定载重能力的优势,但因为续航与速度上的短板,这类无人机往往只能承担一些近程、低空的飞行工作,比如航拍之类。

至于高空远程类飞行,仍是由固定翼无人机主导,毕竟这类无人机速度更快、飞的更高、续航也更远,不过固定翼无人机也并非完美,灵活性差、场地需求较大,适用范围窄是它们的弱势所在。
那么是否有兼备以上两种无人机优势的飞行器呢?

答案是有的,采用空中仿生学设计的扑翼无人机可以靠翅膀产生的升力和推力,实现安静、安全、高效的飞行,而且它还能提供比固定翼和多旋翼无人机和更好的灵活性与节能表现。
但扑翼机目前仍无法像后两者那样得到大规模的商业应用,是因为其一直都没能拥有一套良好的栖息与着陆机制。
可能有人会问,既然扑翼机器人都能学会鸟类的飞行技巧,不能再顺便学习下鸟类的着陆技巧吗? ‘

还真不是这样,一只鸟降落在树枝上虽然看上去是世界上最简单的动作,但事实上,这个动作要涉及到时间、高冲击力、速度和精度之间极其微妙的平衡,是一种非常复杂的动作,直到现在,还没有哪款扑翼机能够掌握它。
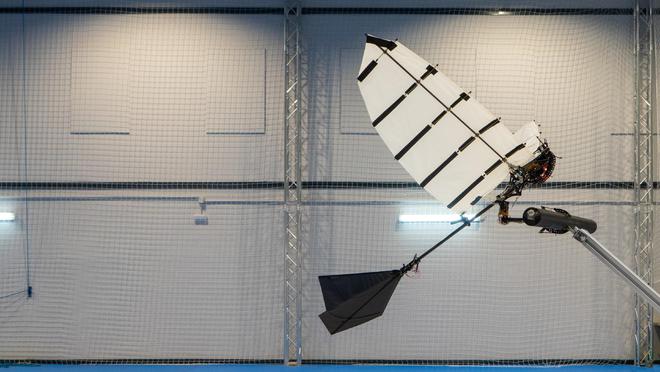
不过,最近来自瑞士洛桑联邦理工学院(EPFL)的研究人员开发了一种特殊方法,终于可以让扑翼机器人稍稍掌握了点鸟儿们的着陆本领,它可以利用一个类似爪子的机制自主降落在水平栖木上。
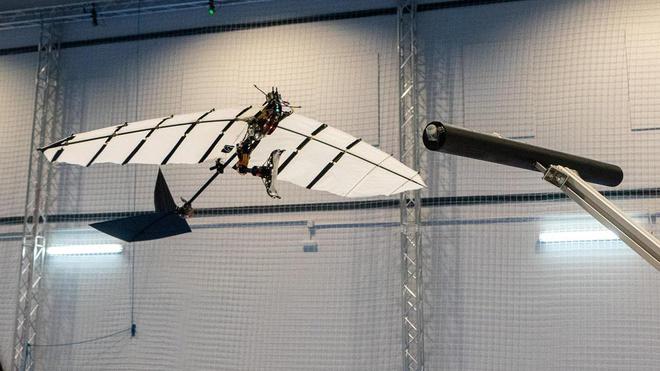
为了验证这种方法的有效性,研究人员制造了一款名为P-Flap的扑翼机器人原型机,它的翼展为1.5米,重量仅为700克。
该机器人由EPFL研究所的博士后RaphaelZufferey设计,制造和测试工作则是其与塞维利亚大学的同事合作完成。这款机器人也是欧盟GRIFFIN项目的一部分,GRIFFIN是“通用兼容的空中机器人操纵系统,整合固定翼和扑翼以增加航程和安全性”的缩写。

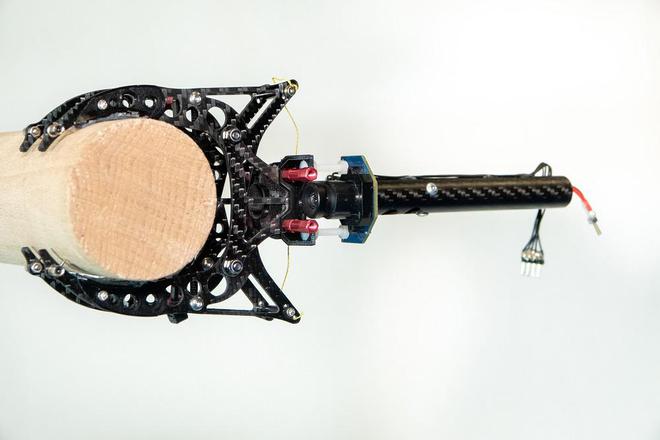
为了能够抓住树枝或管道等圆杆目标,P-Flap配备了一个弹簧机械爪,且机械抓不需要通电就能保持打开和关闭状态。
考虑到爪子必须有足够的强度来抓取着陆点并支撑机器人自身的重量,又不能重到无法高举起来,他们选用碳纤维作为机械爪的材质,并且也没有像真正的鸟类那样采用更复杂的双爪式设计。
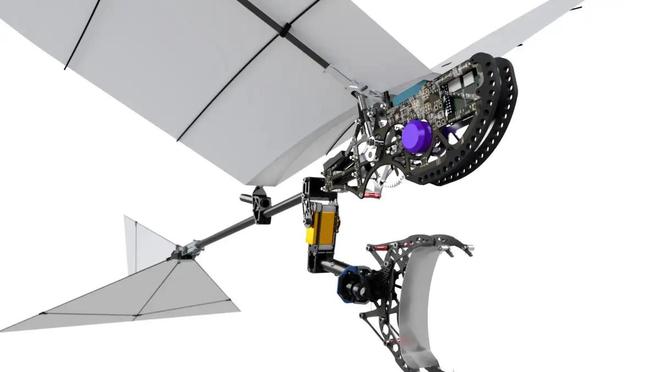
这个单爪通过一个伺服装置驱动的机械腿连接在无人机底部,腿部可以根据需要调整各种角度。此外,扑翼机还配备有碳纤维机体,机载计算机和导航系统,并由一个外部运动捕捉系统作为补充。其腿爪附件也经过了精确校准,可以弥补飞行时的上下摆动,让P-Flap能够准确瞄准并抓住栖木。
那么P-Flap具体是怎样完成着陆的呢?
首先,当其飞行至接近水平栖木时,无人机外部的动作捕捉系统会通过无线传输进行数据引导,这些数据可以让其知道自己与栖木的相对位置,此时它的机载飞行控制系统会计算并调整机身的俯仰、偏航和高度,以便其靠近目标。
一旦它的机械爪达到距离栖木1米以内的范围时,爪子底部的线性视觉传感器就会提供更精确的位置数据,并激活腿部的伺服装置来精确定位。
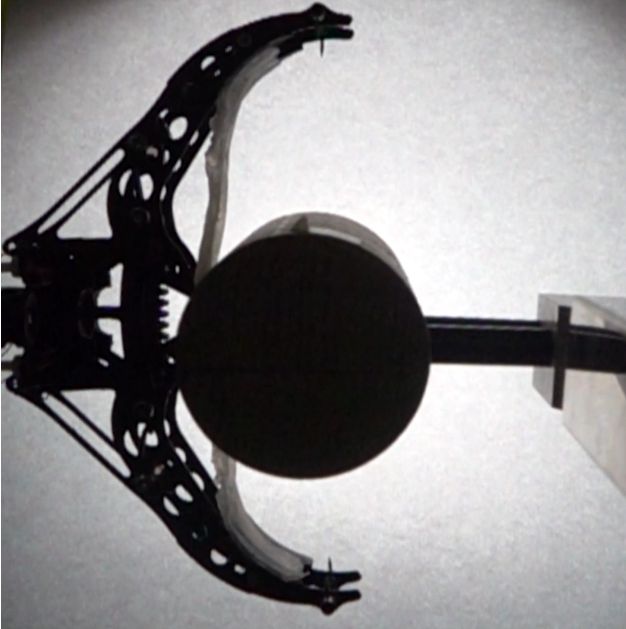
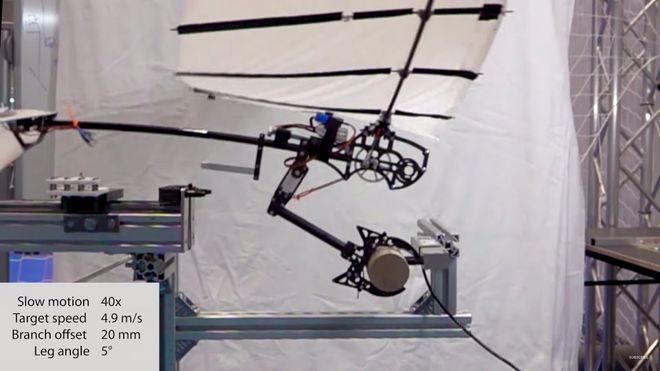
此时,张开的爪子会通过其内部的两个凸起触点击中目标,而后爪子会在压力作用下于短短25毫秒内自动闭合,将P-Flap牢牢固定在栖木上。
由于这个机械爪本身的设计就是为了吸收机器人在撞击时向前的动量,并迅速而牢固地闭合以支撑其自身重量,所以机器人停在栖木时是不会消耗任何能量的。
当它要离开栖木继续飞行的时候,机械爪轴上的弹簧装置会再次打开,好让P-Flap扇动机翼起飞。而这整套着陆起飞动作做下来和真正的鸟类其实也差不太多了。
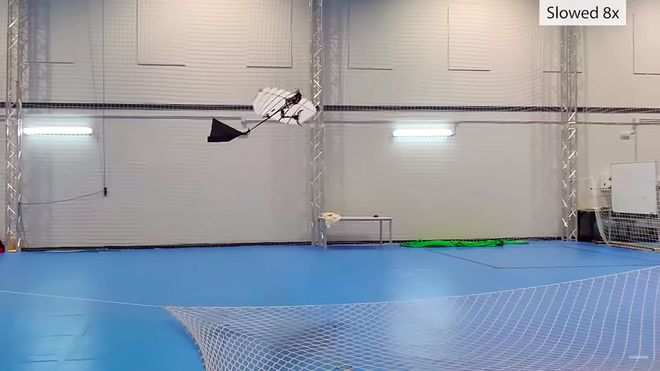
虽然,P-Flap在实验室的测试很成功,但这还仅仅是整个扑翼机器人项目的第一阶段,因为P-Flap必须在一个可控的飞行区域,并通过外置的运动捕捉系统才能进行精确定位。
之后研究人员希望通过进一步的技术迭代,提高机器人的自主性,以便它在更不可预测的室外环境中执行栖息和操作任务。
根据研究团队的预期,当未来的P-Flap能够在栖木上完成真正的自主降落时,它就有可能用来执行一些特定任务,比如不引人注目地收集生物样本或从树上测量数据。如果这款扑翼机器人能降落于更多特定的人工结构上,说不准还能开辟出更多的应用领域。
最重要的是,一旦精通了鸟类的着陆的本领,扑翼无人机将再也不用担心续航不足的问题,而它们也将能胜任更多远程飞行任务。
因为这种无人机可以采用小电池搭配太阳能充电的自给自足式组合,这样电用完时,它可以随便找个树枝、铁管之类的地方降落,再利用太阳能为自己充电,只要充满了电它就能继续接下来的路程,如此反复,直到抵达自己的任务地点。【END】
来源: 天天汽车 发布:北京无人机系统博览会

2026北京国际低空经济与无人机系统产业展会
联系人:谢经理
手机:136 7103 9528邮箱:2378753147@qq.com
公众号:uasexpochina
官方网:www.uasexpo.cn
时间:2026年6月26日-28日
地点:北京首钢会展中心地址:北京市石景山区石景山路68号

Copyright © By 北京国际低空经济与无人机系统产业展览会官方网 | 中圣会展.北京中圣国际会展有限公司. 京ICP备20026188号-5